
什么是HC-SR04超声波传感器:工作及其应用
HC-SR04超声波传感器包括一个发射器和一个接收器。这个传感器是用来求出物体的距离的。在这里,发送和接收声波所花费的时间将决定传感器和物体之间的距离。该传感器采用非接触技术,利用声波。通过使用该传感器,可以在不损伤的情况下测量目标所需的距离,并提供准确的细节。该传感器的使用范围在2厘米到400厘米之间。
什么是HC-SR04超声波传感器?
HC-SR04是一种超声波传感器,使用声纳找出物体从传感器的距离。它提供了一个出色的非接触检测范围,高精度和稳定的读数。它包括两个模块,如超声波发射器和接收器。这种传感器用于各种应用,如方向和速度测量,防盗报警,医疗,声纳,加湿器,无线充电,无损检测和超声波。

HC-SR04超声波传感器引脚配置
该传感器包括四个引脚,下面讨论该传感器的引脚配置。
- PIN1(VCC):该引脚为传感器提供A + 5V电源。
- PIN2(触发):这是一个输入引脚,用于通过将该引脚保持高电平10US来通过传输超声波初始化测量。
- Pin3 (Echo):这是一个输出引脚,在一个特定的时间周期内,它将等同于波返回到传感器的持续时间。
- PIN4(接地):这是用于连接系统的GND的GND引脚。
特征
的HC-SR04传感器的功能包括以下这些
- 的电源供应用于该传感器是+ 5V DC
- 尺寸为45毫米x20毫米x15毫米
- 用于该传感器的静态电流<2mA
- 触发器的输入脉冲宽度为10U
- 工作电流15mA
- 测量角度为30度
- 距离范围为2cm ~ 800cm
- 分辨率为0.3 cm
- 有效角度<15°
- 工作频率范围为40Hz
- 准确性是3毫米
HC-SR04超声波传感器工作
HC-SR04超声波传感器配有四个PIN,即VCC引脚,触发销,回声销和接地销。该传感器用于测量目标和传感器之间的准确距离。该传感器主要用于声波。
当给这个模块供电时,它会产生声波,通过空气传播,击中必要的物体。这些波从物体上传回来,然后由接收模块收集。
在这里,距离和时间是成正比的,因为距离越大,时间越长。如果将触发针保持高位10µs,则会产生以声速传播的超声波。所以它会产生8个周期的声波脉冲然后在Echo针内收集。该超声波传感器与Arduino接口,测量传感器与物体之间的必要距离。距离可以用下面的公式来计算。
S = (V x t)/2
's'是所需的距离
“V”是声音的速度
't'是在击中对象后声波返回的时间。
可以通过将其值与2除以一旦波浪行驶并从传感器回来的时间来计算实际距离。
HC-SR04超声波传感器与Arduino板
在这里,我们展示了HC-SR04超声波传感器的示例arduino董事会。该传感器与Arduino板接口。
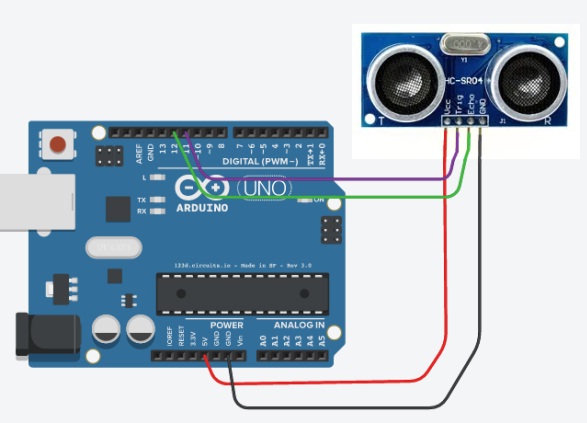
该项目所需的组成部分主要包括Arduino Uno董事会,HC-SR04超声波传感器,面包板和跳线电线。这个项目的连接非常简单,如下所示。
- 传感器的VCC引脚连接Arduino的5V
- 传感器的Trig引脚与Arduino的pin 11连接
- 传感器的Echo引脚连接Arduino的引脚12
- 传感器的GND引脚连接到Arduino中的GND引脚
在职的
通过与HC-SR04传感器接口,可以实现精确的距离测量不同类型的Arduino板。
首先给传感器通电,将传感器的GND引脚连接到Arduino板的GND引脚。传感器模块在通过传感器的电流低于15mA时,可以通过Arduino板的电压供电进行上电。所以Arduino的电流等级不会影响传感器。
一旦设置了主要的布置,那么将传感器的引脚连接到Arduino板的输入/输出引脚等传感器。正如我们之前讨论的那样,传感器中的触发引脚必须在开始时保持10US,以启动测量方法。因此,该传感器模块将由40,000 Hz频率从源极为每秒产生声波。
当声波返回时,回声引脚将激活,直到接收器获得这些波。时间将在Arduino板的帮助下测量。
应用程序
的HC-SR04传感器的应用包括以下这些,
- 这个传感器用来测量速度和两个物体之间的方向
- 它用于无线充电
- 医学超声检查
- 这是用来检测对象避免使用机器人,如两足机器人,寻径机器人,障碍避免, 等等。
- 深度测量
- 增湿器
- 该传感器用于通过旋转传感器附近的物体来绘制
- 非破坏性测试
- 通过使用该传感器深度凹坑,可以通过通过水传递波来测量井。
- 嵌入式系统
- 窃贼警报
因此,这是关于HC-SR04的全部超声波传感器。最后从以上信息可以得出结论,该传感器使用声纳来测量传感器与目标之间的距离。发射机发出高频声音信号。一旦信号发现了一个物体,它就会反射回发射机的回波管。信号传输和接收所花的时间使我们能够确定到一个物体的距离。这里有个问题,什么是同样的距离决定传感器?
分享这个帖子:



