
线跟随机器人-控制,工作原理和应用
机器人简介:
机器人是任何完全自动化的机器,也就是说,它自己启动,自己决定工作方式,自己停止。它实际上是人类的复制品,旨在减轻人类的负担。可采用气动控制、液压控制或简单的电子控制方式。第一个工业机器人是由George Devol和Joe Engelberger在50年代末60年代初制造的Unimates。
任何机器人都建立在俄罗斯科幻作者Isaac Asimov所定义的3个基本法律上:
- 机器人不应直接或间接地伤害人类。
- 机器人应该服从人类的命令,除非违反了第一条定律。
- 在不违反前两条定律的前提下,机器人应该保护自己的存在。

机器人可以是固定的,也可以是移动的。移动机器人是指具有移动基座的机器人,它能使机器人在环境中自由移动。线跟随机器人是一种先进的移动机器人。它基本上是一个机器人,它遵循特定的路径或轨迹,并决定自己的行动路线,与障碍互动。路径可以是白地板上的一条黑线(可见)或磁场(不可见)。它的应用从基本的家庭用途到工业用途等。目前工业上的情况是他们用起重机系统把包裹或材料从一个地方运到另一个地方。有时在那个时候提起大的重物可能会导致提起材料的破损,也会造成包裹的损坏。该系列机器人通常用于携带儿童通过商场、家庭、娱乐场所、行业。使用后面的行机器人车辆是将材料从一个地方运送到行业的另一个地方。该机器人运动完全取决于轨道。机器人可以做任何让你设置的东西。就像在工厂一样,他们与他们的产品有关的只是制造机器人。
行追随者机器人
线从动机器人是一个机器人,其遵循由进料回机制控制的一定路径。
构建一个基本的线跟随机器人:
构建一个基本的线跟随机器人涉及以下步骤。
- 设计机器人的机械部分或身体
- 定义机器人的运动学
- 设计机器人的控制

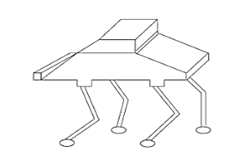
机器人的机械部分或本体可以使用AutoCAD或Workspace进行设计。一个基本的直线跟随机器人可以由一个在两端安装轮子的基座组成。一块长方形的硬塑料板可以用作底座。此外,像圆柱体这样的刚体可以与其他通过关节相互连接的形状体一起添加,每个形状体在特定方向上都有其定义的运动。Line跟随机器人可以是具有固定基座的轮式移动机器人,也可以是具有多个刚体并通过关节相互连接的腿式移动机器人。
下一步涉及定义机器人的运动学。机器人的运动学分析涉及到它在固定坐标系下的运动描述。它主要涉及机器人的运动,对于有腿机器人,主要涉及每个身体的运动。它通常涉及到机器人运动的动力学。通过运动学分析确定了机器人的整个运动轨迹。这可以使用Workspace软件完成。
机器人的控制是其工作中最重要的方面。这里的控制指的是机器人的运动控制,即控制车轮的运动。基本直线跟随机器人沿着一定的路径运动,通过控制放置在两个电机轴上的轮子的转动来控制机器人沿着该路径的运动。因此,基本的控制是通过控制电机来实现的。控制电路包括使用传感器来感知路径和的微控制器或任何其他装置通过电机驱动器,根据传感器的输出来控制电机的运行。
线跟随机器人的2种控制方式
- 不使用微控制器
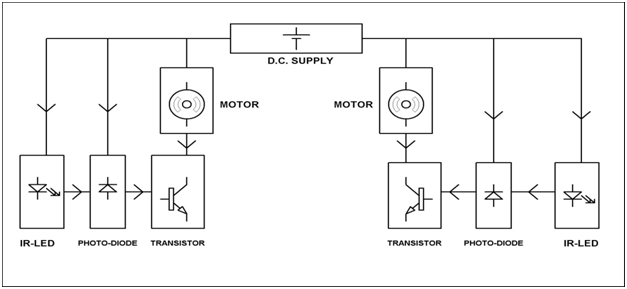
它由每个电机的IR-LED和光电二极管组成,由晶体管的开关控制。
得到适当偏置的红外LED发出红光。这种红外光在白色表面上反射,反射的红外光入射到光电二极管上。光电二极管的电阻减小,这导致通过它的电流增加,从而电压降。光电二极管连接到晶体管的底部,由于光电二极管的电压增加,晶体管开始导电,因此连接到晶体管集电极的电机得到足够的电源开始旋转。如果在路径上遇到一个黑色的颜色的传感器安排之一,红外光不反射和光电二极管提供更多的电阻,导致晶体管停止导通,最终电机停止旋转。
因此,整个系统可以用一个简单的led -光电二极管-晶体管排列来控制。
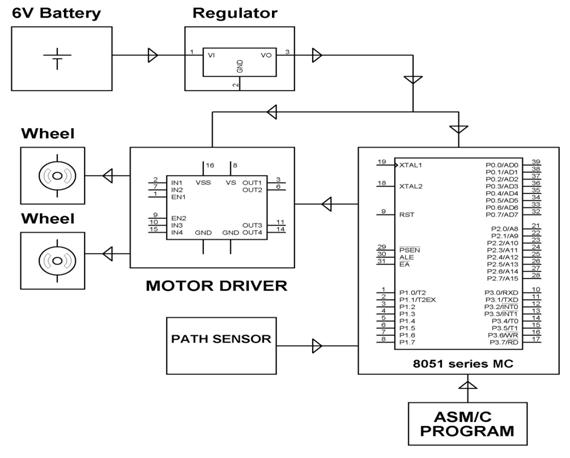
- 使用微控制器
工作原理:
该线路跌倒机器人是自动机器人之一。它检测和朝向该区域绘制的线。该线由白色线上的白色线路指示或白色表面上的块线表示。该系统必须是义的。此应用程序取决于传感器。在这里,我们使用两个传感器进行路径检测目的。这是接近传感器和IR传感器。用于路径检测的接近传感器和用于障碍物检测的IR传感器。这些传感器安装在机器人的前端。微控制器是智能设备,整个电路由微控制器控制。
不同类型的线控机器人车:
有两种线控机器人运载器
- 移动式线控机器人车
- 基于RF的线路控制机器人车辆
线追随器机器人的应用:
- 工业应用:这些机器人可以在工业中代替传统的传送带作为自动化设备载体。
- 汽车应用程序:这些机器人也可以用作自动汽车在嵌有磁铁的道路上跑步。
- 国内申请:这些也可以用于家庭用途,如清洁地板等。
- 指导应用程序:这些可用于商场,博物馆等的公共场所,以提供路径指导。
优点:
- 机器人运动是自动的
- 它是用于长途应用
- 建筑的简单
- 适应和遗忘系统
- 适用于家庭、工业自动化等领域。
分享这篇文章:




很好,我正在学校的科学展览上做这个项目
嗨Anubhab熊猫
很高兴听到你这么说,祝你一切顺利
我做了一条线路,但电机没有运行
嗨杜尔迦
请检查连接以以及组件
你好,
我有一个疑问,如果它在线或路径上有一个断点,线跟随机器人如何跟随预定的路径?
那么交叉路口呢?机器人将如何做到这一点?
我怎样才能制造出一辆可以在没有司机的情况下将原材料从一个地方大批量生产到另一个地方使用的随车,我怎样才能设计出更大规模的随车,你能帮忙吗?太感谢了
你好,我想知道你是否能告诉我这些在行业或世界上有什么用途。尽快回复,谢谢
需要完整的冻结电路图
Hai先生,你能给我一些关于源代码的合适的信息吗,可以让机器人沿着路径移动,或者在你的网站上提供任何代码??你能发给我任何基本的代码吗???
谢谢你!
非常感谢您的指导。
很好,但是如何下载PDF文件请告诉我
嗨Pradipkriplani,
对于任何帮助或定制的项目,请发送电子邮件给我们team@elprocus.com