
工程专业学生最新的基于微控制器的机器人项目
机器人一词最早是由捷克剧作家卡雷尔·卡佩克在1920年提出的。机器人这个词也用来描述智能机械设备。机器人技术是技术的一个分支,涉及设计,创造,操作和机器人的应用.robotics一词由robot一词衍生而来。主要有四种类型的机器人目前市面上有:串联式、移动式、并联式和行走式。机器人的组成部分是机械手、末端执行器、夹持器、电源和控制器。这篇文章列出了基于微控制器的机器人工程学生的项目。
什么是机器人?
当我们想到机器人时,我们首先想到的是它是一种模仿人类的机器。但实际上,机器人并没有一个标准的定义。然而,机器人必须具备一些基本特征,例如:感知、运动、能量和智能。有些机器人可以自己工作并执行某些任务,而另一些机器人则需要人类的干预和帮助。机器人被用于许多应用,如医疗、空间通信和bob的是什么网站军事应用。
电子和汽车行业在机床上的支出一直在突飞猛进地增长。根据行业研究,印度在机床上花费了近千亿卢比。为了推进高性价比机器人系统的需求,班加罗尔的机器人很活跃,一家公司发布了两款高性价比机器人:Artrimus和G4。Artimus是一个高性价比的机械臂,G4是一个高速龙门机器人。

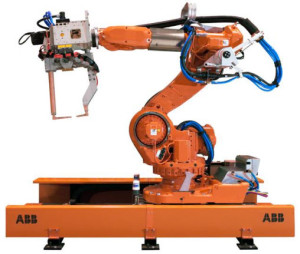
什么是工业机器人?
国际标准化组织(ISO)定义的工业机器人是可重复控制、可重编程和多用途的机械手,并可在多个轴上编程。这些机器人被设计用来移动零件、材料和工具,并在制造和生产中执行各种任务。
现代工业机器人是工程学的真正代表。这些机器人可以携带大约100磅的货物,并且移动速度非常快,具有可重复性。这些机器人可在许多应用程序中进行编程,并用于汽车工业的组装,弧焊和材料处理应用程序。
工程专业学生的基于微控制器的机器人项目
下面的列表提供了具有成本效益的基于微控制器的机器人项目,对学生很有帮助。因此,针对工程专业学生的基于微控制器的机器人项目包括以下内容。
远程监控机器人虚拟
本课题用于设计一个远程呈现机器人。在这个机器人中,在一个偏远的区域设置了一个摄像头,在树莓派的帮助下以视觉形式捕捉周围的环境。这些视觉效果显示在用户头盔的虚拟现实中。
一个额外的功能允许摄像头在用户头部运动的方式,给用户一个直接的体验,因为如果他在那里,无论虚拟远程呈现机器人的机器人被放置。这种机器人还可以通过用户智能手机中安装的应用程序进行任何操作。
足球机器人
本课题用于设计一个足球机器人。这个机器人可以使用android应用程序向不同的方向移动,如向前、向右、向后退和向左。机器人的速度移动可以通过手机的旋转角度来控制。一旦摇动智能手机,机器人就会踢球。
金属探测机器人
本课题实现了一种采用单片机的机器人,用于检测其前方车道上的金属。这种机器人在探测地雷和地下金属方面很有帮助。本课题采用射频技术对机器人进行控制。
人体检测机器人
根据应用的不同,有不同的人体检测机器人可供选择。但在地震期间,对救援队来说,很难发现建筑物下的人,因为这需要很多时间。为了克服这些情况下的问题,实现了人体检测机器人,利用人体检测传感器检测人类的不适当时间。该人体检测机器人可以在个人电脑上通过射频技术手动操作
通过MEMS传感器控制的触觉食指
触觉是通过握住工具来感知世界。本课题实现了一种残疾人用食指检测机器人,使残疾人可以按照食指的方向运动。
机器人路径可能是连续的,否则点对点。该机器人使用的传感器主要是检测食指方向并产生输出。该输出可以通过射频发射机传送到射频接收单元。
在射频接收器中,接收器接收信号命令微控制器,使机器人可以向特定的方向移动。该系统采用了射频技术、MEMS传感器和单片机。机器人通过MEMS传感器获取指令。在发射机部分,该传感器可布置在食指上。
基于单片机的无人驾驶汽车设计
本课题利用单片机和GSM网络实现了一种无人驾驶汽车。由于GSM网络的频率范围有限、控制能力有限等缺点,本方案采用GSM网络代替射频遥控。
土地测量机器人的实现
本课题设计了一种采用单片机的机器人,即土地测量机器人。这个机器人是专门设计来计算土地的面积,并把它分成不同的地块。该项目包括两个部分,如该地区的调查机器人和测量模块。该机器人的控制可以使用ZigBee模块,使机器人可以在整个地块中移动。
机器人行走距离的计算可以利用定时器的概念来完成。这个距离值可以发送到PC上。在本系统中,第二部分涉及到区域测量模块。该模块可以用嵌入式C语言设计,使用户可以高效地确定图形的区域。
壁画机器人
本项目的主要概念是实现一个墙体喷漆机器人。这种机器人有助于实现低成本的涂装设备。设计这个机器人的主要原因是,墙画中的化学物质会导致人类画家的健康问题,如眼睛和喉咙感染问题。
手工绘画由于反复的工作而消耗大量的时间。一旦机器人和施工中的工人被恰当地纳入到施工任务中,那么整个施工过程就可以通过减少人力来更好地管理。此外,当多个活动同时发生时,它将解决大部分与安全有关的问题。
爬墙机器人
该机器人的主要功能是设计和开发一个爬墙清洁单个大窗户的机器人。这个机器人用吸盘吸尘贴在玻璃表面。这个机器人使用连接在前面的机器人的雨刷清洁窗户。一旦清洁完窗户,机器人就会根据微控制器给出的指令停止清洁。
对于机器人与外界的粘附,有不同的方法,如磁力、微脊柱等。然而,我们在这个系统中开发了Elecrochuks来实现机器人的粘附。这个机器人的尺寸大约是690毫米的倍,而它的重量大约是3公斤以下。
采用微控制器的四合一机器人
本课题实现了一种基于单片机的四合一机器人,其工作模式有边缘检测、循行、探路和障碍物检测四种。该项目可以通过ATMEGA168单片机来实现开关、传感器和LED的目标。
使用微控制器和机械臂的太阳能工具
机器人交易通过自动化机器可以取代人类,暗示只是看起来像人类。机器人的手臂是一种机械装置,通常采用与人类手臂相同的功能。我们知道太阳能是一种明亮的光和太阳产生的热。所提出的系统被用来设计一个机器人,可以通过机器人手臂的太阳能供电来挑选和放置物体。
在该系统中,主要设计了以太阳能为动力的机器人车辆。这主要用于增加使用太阳能的车辆的功率。在本项目中,机械臂被设计用于处理车辆,以捡拾和放置物体。汽车充电有两种方式,一种是直接供电,另一种是太阳能跟踪。因此,机器人可以利用全部的太阳能来进行所需的操作。
管道检测移动机器人分析与控制
本课题设计了一种用于管道检测的机器人。该机器人可以通过传感器进行设计。本课题通过分析四杆法的加速度和速度来控制机器人。该机器人采用8051单片机控制,包括发射机和接收机两部分。
发射机包括四个开关,提供四种命令,而接收器连接GSM,一旦机器人收到命令,它就会发送信息,一旦机器人检测到任何障碍。在接收器中,它包括一个通过GSM工作的红外传感器来检测障碍物。GSM将有助于设计交互功能,从而减少发现问题所需的时间。
电动轮椅用眼控制系统
本课题用于实现一种电动轮椅用眼控制系统。该系统的控制只能通过眼睛来完成。因此,身体残疾的人可以自己控制电动轮椅。通过本项目的应用,该系统对上述功率因数具有较强的抑制能力。此外,还证实了该方案可以通过人眼进行安全、准确的控制。
RFID服务机器人
本课题利用RFID技术设计一种服务机器人。这种机器人用于提高餐厅、酒店内为顾客提供食物的服务效率,减少等待时间。在这个项目中,所需的操作可以在PIC微控制器和RFID技术的帮助下完成。
路虎手机操作
本项目实现了一个路虎机器人,机器人的控制可以通过感知、动作和处理三个不同的阶段来完成。一般情况下,感知器就是安装在机器人上的传感器,通过微控制器进行处理。该任务可以在电机或执行器的帮助下完成。
本项目中的机器人可以通过电话控制,只需拨打与机器人车辆相连的电话即可。与按钮匹配的移动音可以在处理端听到。路虎机器人通过机器人内部堆叠的电话识别这种DTMF音调
蓝牙控制机器人
本课题实现了一种通过蓝牙控制的机器人。这些机器人可以通过从安卓手机传输的信号和蓝牙通信来操作。bob的是什么网站本课题主要采用单片机、直流电机和蓝牙模块。只要使用微控制器进行信号处理,就可以通过蓝牙设备建立系统和用户之间的连接。这些机器人的应用包括远程车辆无人任务。
机器人通过Wi-Fi和微控制器控制
如今,WiFi已经成为我们日常生活中必不可少的一部分,由于技术的发展,连接到互联网的不同设备将会增加。在这个项目中,集成过程可以通过使用嵌入式系统和互联网来完成。
该机器人可以通过网站或电脑,借助Wi-Fi,如通信模块。bob的是什么网站必须使用该模块在用户和机器人之间建立连接。用于构建这个项目的基本组件是微控制器,Wi-Fi模块,如ESP8266和直流电机。
利用太阳能的水垃圾收集机器人
本项目实现了一种利用太阳能收集水垃圾的创新机器人。该项目的主要目的是清理水体表面可以收集到的垃圾。这个项目有助于清洁水源,从而减少污染。
这个项目可以通过RC遥控器进行控制。本项目采用直流泵提供方向控制,并布置伺服电机进行导航。在这里,安装了两块太阳能电池板,以使机器人在水上自给自足。这些面板有助于为电池充电,垃圾收集可以使用线规完成。
利用射频机器人监测野生动物
本课题设计了一种利用射频监测野生动物的机器人。通过使用这个项目,操作者不需要靠近野生动物来非常近距离地拍摄镜头。在这里,该机器人使用夜视系统,利用机器人上的夜视相机来观察野生动物。该机器人可通过射频遥控器进行无线控制。录制的视频可以存储在电脑上观看动物。
该系统采用8051单片机接收来自射频发射机的信号进行进一步处理。这些信号可以传输到射频接收器,以便微控制器处理这些数据来驱动电机。这样机器人车辆就可以操作了。一旦微控制器得到改变相机方向的信号,然后它转发给电机以获得相机的首选角度。因此,可以使用机器人通过夜视相机进行野生动物的观察,使用射频远程对动物进行近距离观察。
以下是一些基于微控制器的机器人项目的想法。
- 选择n -放置机械臂以及Android无线控制的移动
- 具有远距离语音识别功能的语音控制机器人车辆
- 带有夜视无线摄像头的战地监视机器人
- 曼彻斯特码解码通过电视遥控器控制机器人方向
- 火感与控制机器人“,
- 通过互联网局域网控制机器人手臂进行病人手术
- 由Android应用程序远程操作的消防机器人
- 带有夜视无线摄像头的战场侦察机器人
- 消防机器人车
- 选择n -地方与软捕获抓手
- 金属探测器机器人车
- 手机控制机器人车辆
- 跟随机器人车辆使用单片机
- 红外控制机器人车
- 基于触摸屏的仓库管理遥控机器人车
- 自动地铁列车穿梭于车站之间
- 避障机器人车
- 具有激光光束管理的射频控制机器人车辆
工程专业学生机器人项目
近年来,与其他项目相比,许多工程专业的学生开始对机器人项目表现出浓厚的兴趣。机器人,比如拾取,跟线、墙壁轨迹和使用微控制器的机器人项目是学术层面的热门项目。下面列出的基于微控制器的机器人项目和工程专业学生的机器人项目对学生很有帮助。除此之外,还有一些电子产品bob足球体育app机器人应用的工程项目。
- 真人报警和检测机器人
- 无线PC控制机器人
- 基于射频的无线摄像机遥控机器人
- 基于人工视觉的自主机器人障碍物检测
- 视频视觉无线室内清新剂喷洒机器人
- 简单的取放机器人
- 触摸屏控制智能机器人
- 基于鲁棒语音识别的人机界面
- 无线控制的石油气气体及烟雾探测机器人
- PC控制的无线多用途机器人
- 语音识别的机器人带有火灾传感器指示
- 带有火灾传感器的遥控机器人
- 机械臂与MCU/RF/IR/PC接口
- 速度喷雾器机器人
- 太阳能电池板跟踪机器人
简单机器人初学者项目
对于初学者来说,最好是去简单的机器人项目学习基本概念和技术,这将挑战他们面对大型和复杂的机器人,因为他们已经习惯了实践。

- GSM移动控制机器人
- 边观察机器人
- 光后,机器人
- 一个简单的直线跟随机器人
- 墙追随者机器人
- 炸弹探测机器人
- 来自垃圾的太阳能机器人
- 口袋里喝醉的机器人
- 太阳能蟑螂Virbobot
- 闪烁的LED宠物
- 棘手的Robot-Paper模型
Arduino机器人项目
Arduino是一种单板微控制器,其硬件由开源硬件板组成。本硬件板采用8位Atmel芯片设计AVR单片机或32位Atmel ARM。Arduino的设计目的是为交互式对象提供一种简单的编程方法。这里我们已经提到了一系列基于微控制器的机器人项目,比如Arduino。

- 用Arduino控制一个OWI机械臂
- DFRobotshop Rover或Arduino on Tracks
- 语音控制Arduino机器人
- 基于Arduino Nano的Microbot
- 反向工程的RC汽车,使Arduino漫游者
- 2WD扩展平台Arduino机器人底盘智能汽车底盘
- Arduino机器人四轮驱动智能汽车底盘套件与速度编码器
- Hexbug Spider Hack
- 步行机器人Stompy
- Arduino机器人原型
- Arduino测试机器人
- 基于Arduino和MPU6050的二轮自平衡机器人
bob足球体育app电子工程项目
在我们的日常生活中,电子产品扮演着重要bob足球体育app的角色。所以,如果我们学习一些基本的电子知识,这对我们是有利的。bob足球体育app这些电子项目涉及各种电路,可能包括诸如电容器、二极管、集成电路等概念。许多人现在对各种电子工程分支表现出兴趣。bob足球体育app在工程的电子分支做了一些项目后,我们可以获得实际的电子知识。bob足球体育app对于那些对电子项目感兴趣的人,下面的列表bob体育棋牌bob足球体育appbob足球体育app电子工程项目及想法将提供方便。
- 基于Arduino的家庭自动化
- 无线电力传输在3 d空间
- 基于定时器自定义时隙的工业液体泵控制器
- 基于Arduino的路灯亮度自动控制
- 高电压直流马克思发电机原理
- 电子眼控制安全系统
- 远程调频发射机与音频调制
- 基于时间延迟的继电器操作负载
- 使用555定时器将6V DC升到10V DC
- 三相电源相序检查器
- 带有自动喷水灭火系统的火灾或烟雾探测器
- 基于GSM/GPRS的泵开和关系统
- 手机控制的IVRS系统
- 自动路灯控制系统使用高灵敏度LDR
- 根据高速公路来车自动调速
- 机器人的应用
- 机器人的应用可以分为两类:当前应用和未来应用。
- 当前的应用程序包括:
- 物料输送,机器装卸
- 处理操作
- 装配和检验
- 未来的应用包括:
- 医疗
- 军事-火炮,装填,监视
- 国内的应用程序
- 电子行业
- 全自动机加工车间
这是所有关于机器人的项目列表,如低成本的基于微控制器的机器人项目,简单的机器人项目,Arduino机器人项目和针对工程专业学生的机器人项目。我们希望您对基于微控制器的机器人项目有更好的理解和概念。请在下面的评论区分享你对这篇文章的看法,如果想进一步帮助实施这些项目,你可以联系我们。
照片学分:
- 机器人工程采用单片机实现daihen-usa
- 工业机器人由linksic
- 工程专业学生机器人项目bob足球体育appelectronicshub
- 简单机器人项目nootrix
- Arduino机器人项目由rlocman
分享这篇文章:




我想为最后一年分公司电子和电信项目bob的是什么网站bob足球体育app
你们有自动平衡机器人吗?要多少天
非常感谢你提供这个了不起的项目
嗨Nagarani,
谢谢你的赞赏。
更多的项目的想法请点击链接
你的表演很好,我尽力了
有不同的aurdino, rasberypii等技术
你好,Yashi,谢谢你的欣赏。
如欲了解更多有关Aurdino和rasberrypi项目请查看下面的链接。
这里有好点子,但这还不够,因为我们需要更多的应用
嗨Sahina,
获取更多信息和想法机器人项目请点击链接。
我的毕业设计需要帮助