
空间应用中的模块化可重新配置机器人
机器人是自动的机电装置,类似于由电子电路或计算机程序控制的人或动物。有不同类型的机器人用于不同类型的应用程序。近期机器人技术的趋势一直在开发先进的机器人,如外科机器人是用于手术的远程操纵器(特别是锁孔手术),行走机器人大多是通过步行,微大和纳米杆的多腿的移动机器人是微观的,这些纳米机器人或者在人体中用于治疗疾病的纳米器件,这些流浪者是带有轮子的机器人,用于走在其他行星上进行太空探索。通常,空间应用中使用的机器人是自治机器人,模块化可重新配置机器人或自我重新配置的模块化机器人,等等。
模块化可重构机器人
模块化可重新配置机器人通常是具有可调节形态的自主运动学设备。在固定形态机器人中,只能能够执行诸如致动,感测和控制的传统任务。但是,自我重新配置的机器人或模块化可重构机器人能够通过重新组装它们的部件连接来改变自己的形状,从而可以调整新的环境,执行新任务,并从损坏中恢复。

这些自我重新配置的机器人可以定义为可以基于它们必须通过的路径来改变它们的形状的机器人。例如,如果机器人必须穿过窄管,那么它将自身重新配置蠕虫的形状,如果它必须穿过不均匀的地形,那么它将与腿上的蜘蛛重新配置其形状。如果有一个平坦的地形,那么它将自身重新配置为像快速运动的球形结构。
这些可重构的机器人再次分为基于设计的两种类型。如均匀的模块化机器人系统包括几个模块具有类似的设计来形成这样的结构,以便执行所需的任务。异构模块化机器人系统由具有不同设计的多个模块组成,每个模块执行特定功能,并且这些模块用于形成执行所需任务的结构。
空间应用中可重新配置的机器人
作为对其他星球的研究的一部分,许多国家经常发动几颗卫星或太空任务,以研究行星的条件和特征。因此,为了获得长期数据,正在推出长期空间任务,并且这些长期空间任务通常是自我重新配置的系统。
这些自我重新配置的机器人能够在任何损害的情况下处理不可预见的情况和自我修复。我们知道空间任务是巨大的,大规模约束,所以如果我们使用可以执行多个任务的自配置机器人而不是多个机器人每个都只执行一个特定的任务。

到目前为止,人类已经踏上行星地球只是月亮。虽然,空间应用中使用的模块化机器人正在许多其他行星上发起。一系列着陆器,操纵器,轨道和送到火星的船只是空间应用中使用的着名机器人。
机器人操纵器和流浪者
有各种类型的任务,通过空间中的铰接机器人执行。为空间中的设备或设备提供维修的过程称为空间操作,该空间操纵由铰接式机器人完成。Polybot适合空间站或卫星维护和检查。机器人操纵器被投射用于在空间或其他行星上定位,以模仿人类操纵能力。它们通常位于自由传单航天器上或其他航天器的轨道调整,在太空车辆,行星着陆器和用于获取样品的流浪者内。

机器人流浪者被预测用于定位用于模拟人类运动能力的行星。它们经常定位在地面行星表面上,小太阳能系统,Aerobots(行星大气压),Cydrobots(冰层)和水合(液体层)。
自动化设计和优化
模块化可重新配置机器人或模块化机器人系统与软件工具相结合,以帮助选择和设计用于执行每个特定任务的最佳形态和控制结构。虽然这种设计的许多特征都将不可避免地取决于人类智能的可预测的未来,但其他特征是自动化设计和优化的默认。在太空应用中使用的所有可重新配置机器人必须设计成使得能够在发射应力,空间辐射,地球的空间,真空,行星分布和环境中生存(将可重新配置机器人或目标行星上使用的行星)一起存活。
可重新配置机器人有两种类型的设计,它们是:基于格子的设计和基于链的设计。

在基于格子的设计中,重新配置很容易,但很难产生运动,这种设计需要更多的连接器和执行器。
在基于链的设计中,重新配置很硬并没有足够的刚度,但很容易产生运动。
模块化可重新配置机器人仿真
使用C ++开发了一种基于物理学的软件仿真环境,其促进了使用各种类型的模块构造可重新配置机器人的用户。添加其他模块类型,其中包含兼容的连接器,可扩展模拟。
自我重新配置模块化机器人的实际实例
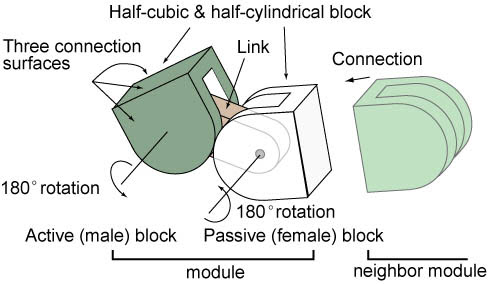
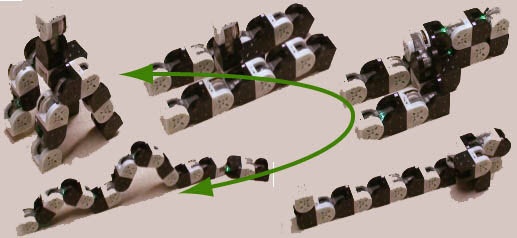
模块化变压器是常用的可重新配置机器人之一,这些M-TRAN模块用于形成3-D结构(可以改变其自己的配置,也能够产生小型机器人),多DOF机器人(灵活的机车),和变形机器人。该模块化变压器由两个执行器和电池组成。
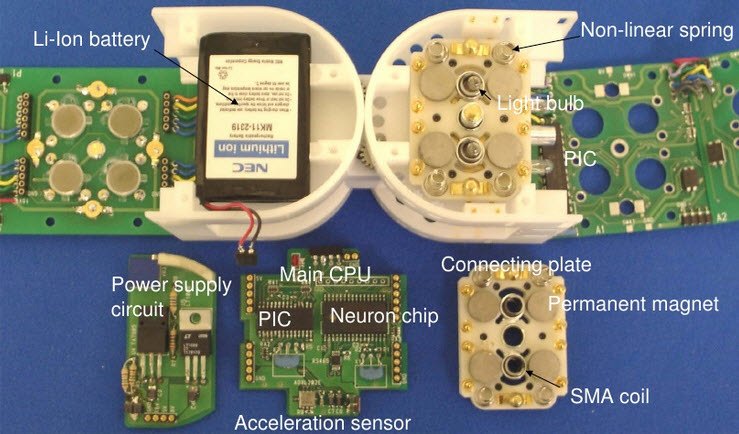
M-TRAN模块的内部框图,由锂离子电池,非线性弹簧,电源电路,主CPU,加速度传感器,永磁体,SMA线圈,连接板和PIC组成。
这些可重构的机器人用于太空应用,以实现电信提供等特定目标,以用于数据返回,军事可行性和地球的观察bob的是什么网站导航目的。
有许多其他基于机器人的项目和应用程序:
- 超声波障碍物感应机器人车辆
- 通过手机机器人车辆运动
- 由电视遥控器操作的机器人车辆
- 轨道传感机器人车辆运动
- 消防机器人
- 语音控制机器人车辆
- 挑选n个地方机器人由Android无线控制
- 金属探测器机器人车辆
- 汽车地铁火车在车站之间穿梭
- 射频控制机器人车辆
- 基于触摸屏的远程控制机器人车辆
希望本文提供有关在空间应用中使用的模块化可重构机器人的简要信息。有关更多信息基于机器人的电子项目bob体育棋牌bob足球体育app您可以通过在下面的评论部分发布查询来接近我们。
照片学分
- 模块化可重新配置机器人AsmigitalCollection.
- 空间应用中使用的机器人机器人
- 机器人操纵器Iccrobotics.
- 基于格子的男性可重构机器人的设计csail.mit.
- 基于链的可重构机器人设计Wikimedia
- 模块化变压器模块单位
- M-TRAN模块的内部图Slidesharecdn.
分享这个帖子:




嗨Mr.Agarwal.
我是学生在电气enginnering。我对微控制器项目感兴趣。我可以拥有这个教育项目的目标吗?
谢谢
嗨哈米德,
有关更多信息和想法微控制器项目请参阅给出的链接。
有关项目的定制,请发送电子邮件给我们team@elprocus.com.
感谢Finallly谈论>空间应用中的模块化可重构机器人Userd
你好,谢谢你的感激。
有关的更多信息机器人,类型,工作,应用程序和项目请参阅给出的链接。
有关项目的定制,请发送电子邮件给我们team@elprocus.com.