
Namaste机器人有语音控制工作和应用
一种机器人是一种机电机这是由电路或计算机程序的指导。借助于执行人类选择不做的连续和危险的任务的借助于人类交换了人类。展示机器人分为不同的类别根据其特征和性能,如工业机器人,商业机器人,服务机器人,移动机器人。以下是一种服务机器人,通过录制的语音消息,执行持续任务,以便通过代表“namaste”的手动移动。一般来说,当我们邀请人们回家,缔约方,婚姻职能,办公室等时,我们需要安排一个人迎接并邀请他们在入口处。如果人们的数量很低,那么任务更简单。但如果你问百人,那么任务很难。为了克服这个问题,这里是一个项目,即带语音控制的Namaste机器人。

Namaste机器人有语音控制
这个namaste的主要概念机器人项目是控制各种伺服电机通过arduino板。这个机器人扫描周围的人,将头部旋转180°。如果它识别在附近的任何人,那么它希望拥有任何双手紧紧挤在一起的人。这是祝人们在印度的传统方式。这机器人的应用涉及购物中心,公园,办公室吸引人民。
Namastae机器人与语音控制的框图
下图表示具有语音控制的Namaste机器人的框图。在这种机器人中,语音命令被编程。整个开发板可以连接到通用电源。每个块的描述如下。这电源供应为所有模块提供电源。这些模块需要MA和工作电压的电流为5V。

Arduino Board.
Arduino是一种工具基于一个简单的微控制器,用于控制和感知物理世界而不是台式计算机。对于物理计算,有各种微控制器平台可用。Arduino的重要功能是便宜的,开源和可扩展软件.Arduino软件可用作开源工具,语言可以通过C ++库进行扩展。
ping传感器
Ping传感器使用声纳控制其附近物体的距离。这传感器用作机器人的眼睛感觉到障碍。例如,接近传感器。它提供了出色的范围准确性和稳定的读数。该传感器的操作不受黑色材料或阳光的影响。Ping传感器的规格是电压为5V,电流为15mA,传感器角度不是> = 15,检测距离为2cm〜450厘米。
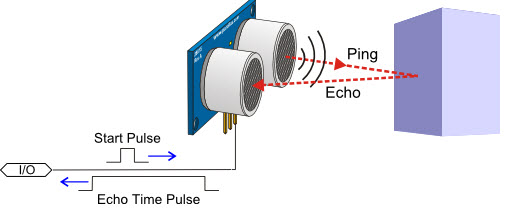
下面显示了具有Arduino的Ping传感器的接口。使用Arduino Board有四个引脚可用于互联网传感器。Arduino板上的四个引脚为GND,VCC,回波和触发。板上的引脚是D0-D13,在该输入和13个引脚中是输入和输出引脚。
Arduino MicroController为我们提供伺服控制库,可让我们轻松切换伺服电脑。在这个项目中,我们使用了5次伺服来规范Namaste机器人,如头部,右肘,左肘,右肩和左肩。这里,数字输入/输出引脚(D5,D6,D9,D10,D1)引脚在接口到伺服电机的Arduino板中表示。
语音播放IC.
此语音播放IC提供以预定义频率速率播放的录制消息。播放被移动到音频放大单元。

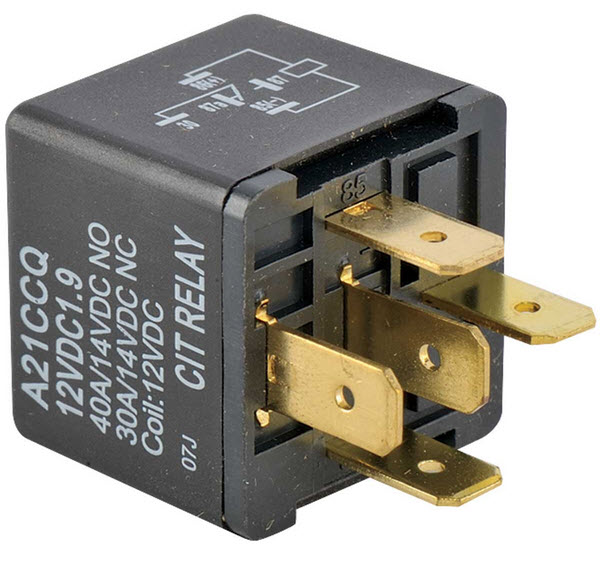
中继
一种继电器是一种开关电动操作。通过继电器的线圈的电流流动使磁场诱使杠杆并改变开关触点。
语音控制Namastae机器人工作
Namaste机器人的工作可以在步骤过程中与模拟结果一起完成。当Namaste机器人处于第一个状态时伺服电机机器人2,3,4,5的S处于关闭状态或零状态。Namaste机器人的头部从中心向右交替,由于伺服电机1的旋转,从左右,然后返回中心,从0°-180°旋转。机器人的头部的运动指定了Namaste机器人正在寻找障碍物。当Ping传感器检测到任何障碍物时,机器人的头部位置以90°角返回到中心和伺服电机1遗物并关闭。它以低状态激活。
当伺服电机1关闭时,伺服4和SERVO5开关等剩余电机开关。信号线为Namaste机器人的右肩部触发。现在机器人的手可以锻炼。肩部伺服电机接通到Arduino板的数字输入和输出引脚。但是,信号线或这些销很高,伺服的位置变为90°。现在伺服4和伺服5关闭。
最后我们可以得出结论,这个语音控制的主要目的机器人是提供服务通过侦探走在它面前的人们来欢迎人们。它可以在公园,商场,派对等各种公共场所使用。我们希望您对这一概念更好地了解。此外,关于这个概念或arduino的任何疑问机器人项目,请通过评论以下评论部分提供宝贵的建议。
照片信用:
- Arduino Board.nyacknewsandviews.
- ping传感器视差
- 语音播放IC.kealab.
- 中继awdirect.
- Namaste机器人canstockphoto.
分享这个帖子:




如何机器人建造请帮助我
嗨Haydath Basha.
谢谢你的询问。有关的更多信息机器人项目请参阅链接。
有关任何项目的定制,请发送电子邮件给我们team@elprocus.com.