
什么是雷达:基础,类型和应用
我们可以观察世界各地不同的物体。类似地,类似雷达的无线电探测和测距技术也被用来帮助飞行员在雾中飞行,因为飞行员无法注意到他们在哪里飞行。飞机上使用的雷达类似于手电筒,用无线电波代替光工作。这架飞机会发送一个闪烁的雷达信号,并监听附近物体发出的任何信号。一旦这些迹象被发现,飞机就会识别出有东西在附近&它利用这些迹象到达所花费的时间来发现它有多远。本文介绍了雷达及其工作原理。
谁发明了雷达?
与其他几项发明一样,雷达系统也不容易归于个人,因为它是早期研究性质的成果电磁为许多电子设备提供的辐射。在第二次世界大战早期,不同的国家对无线电定位技术进行了检查,但由于军事隐私的隐藏,主要关注的问题变得更加复杂。
这篇评论的作者最终得出结论,当雷达系统是一个明显的直接创造的案例时,Robert Watson-Watt的关于飞机的探测和定位的无线电方法在50年前出版的笔记。所以它是这个领域最重要的单独出版物。英国在英国战争中的成就很大程度上分配给雷达系统的扩展,包括具有操作可行性的技术增长。
什么是雷达系统?
雷达代表无线电检测和测距系统。它基本上是一种电磁系统,用于探测从雷达放置点的物体的位置和距离。它的工作原理是向太空辐射能量,并监测物体的回声或反射信号。它在超高频和微波范围内工作。
雷达是电磁传感器,用于注意到,轨道,定位和识别在某些距离处的不同物体。雷达的工作是,它在目标方向上传输电磁能量,以观察回波并从它们返回。在这里,目标只是船只,飞机,天文机构,汽车车辆,航天器,雨,鸟类,昆虫等。而不是注意到目标的位置和速度,而且有时也得到它们的形状和尺寸。
与红外和光学传感设备相比,雷达的主要目标是在困难的气候条件下发现遥远的目标,并通过精度确定其距离、距离。雷达有自己的发射机,它被称为放置目标的照明源。一般来说,它工作在电磁频谱的微波区域,当频率从400兆赫到40兆赫时,以赫兹计算。雷达中使用的基本部件


雷达在1930- 40年代经历了快速发展,以达到军事的要求。它仍然在军队中广泛使用,只要有一些技术进步。同时,雷达也被应用于民用领域,特别是控制空中交通、气象观测、船舶导航、环境、偏远地区的传感、行星观测、工业应用中的速度测量、空间监视、执法等。
工作原理
的雷达的工作原理非常简单,因为它传送电磁能量,同时检查返回到目标的能量。如果返回的信号在其源的位置再次被接收,则传输途中有障碍物。这是雷达的工作原理。
雷达的基础知识
雷达系统通常由发射器组成,发射器产生的电磁信号通过天线辐射到太空中。当这个信号击中一个物体时,它会向多个方向反射或再辐射。该反射信号或回波信号由雷达天线接收,雷达天线将其发送给接收器,在那里对其进行处理,以确定目标的地理统计。
该距离是通过计算信号从雷达到目标再返回所花费的时间来确定的。以角度测量目标的位置,从最大幅度回波信号的方向,天线指向。利用多普勒效应来测量运动物体的距离和位置。
该系统的主要组成部分包括以下几个方面。
- 发射器:它可以是像klystron,行驶波管或电源振荡器等功率放大器,如磁控管。首先使用波形发生器生成信号,然后在功率放大器中放大。
- 波导:波导是用于传输雷达信号的传输线。
- 天线:所使用的天线可以是抛物面反射器、平面阵列或电子操纵相控阵。
- 双工器:双工器允许天线用作发射器或接收器。当变送器工作时,它可以是一个气态设备,其会在接收器的输入处产生短路。
- 接收方:它可以是超差异Ovityne接收器或任何其他接收器,由处理器组成以处理信号并检测它。
- 阈值决定:接收机的输出与阈值相比较,以检测任何对象的存在。如果输出低于任何阈值,就假定存在噪声。
雷达如何使用无线电?
一旦雷达被安装在船上或飞机上,它就需要一组类似的基本组件来产生无线电信号,将它们发射到太空,并通过某些东西接收它们,最后显示信息来理解它。磁控管是一种设备,用来产生无线电信号,并通过无线电使用。这些信号与光信号相似,因为它们以相同的速度传播,但它们的信号更长,频率更少。
光信号波长为500纳米,而雷达使用的无线电信号通常从厘米到米范围内。在电磁频谱中,在整个空气中具有可变的磁性和电能的可变设计,如无线电和光。雷达中的磁控管产生与微波炉相同的微波。主要差异是雷达内的磁控管必须传输几英里,而不是小距离,因此它更强大,更大。
每当无线电信号被发射出去,天线就像发射机一样把它们发射到空中。天线形状一般是弯曲的,主要是将信号聚焦成精确而狭窄的信号;然而,雷达天线通常也会旋转,因此它们可以注意到大面积的行动。
无线电信号从天线以每秒30万公里的速度向外传播,直到它们击中什么东西,其中一些会返回到天线。在雷达系统中,有一个必不可少的设备,即双工器。这个装置是用来使天线在发射器和接收器之间从一边到另一边变化的。
类型的雷达
有不同类型的雷达包括以下内容。
双面雷达
这种类型的雷达系统包括一个tx -发射器和一个Rx-接收器,通过一个等价于估计目标的距离来划分。发射器和接收器位于一个类似的位置被称为修道院雷达,而非常远程的地对空和空对空军事硬件使用双基地雷达。
多普勒雷达
它是一种特殊类型的雷达,利用多普勒效应来产生关于特定距离的目标的数据速度。这可以通过向物体的方向发射电磁信号来获得,从而分析物体的动作如何影响返回信号的频率。
这种变化将为物体速度的径向分量朝向雷达的速度提供非常精确的测量。这些雷达的应用涉及不同行业,如气象,航空,医疗保健等。
Monopulse雷达
这种雷达系统比较获得的信号使用一个特定的雷达脉冲旁边,通过对比信号观察在多个方向,否则极化。最常见的一种单脉冲雷达是圆锥扫描雷达。这种雷达从两种方式直接测量物体的位置来评估返回值。值得注意的是,1960年发展起来的雷达都是单脉冲雷达。
无源雷达
这种雷达的设计主要是通过处理来自周围照明的指示来注意和跟踪目标。这些信号源包括通信信号和商业广播。bob的是什么网站该雷达的分类可以在双基地雷达的同一类中进行。
测量雷达
这些雷达是为测试飞机、导弹、火箭等而设计的。它们在后处理和实时分析中都给出了不同的信息,包括空间、位置和时间。
天气雷达
这些用于通过通过圆形或水平极化使用无线电信号来检测方向和天气。天气雷达的频率选择主要取决于衰减之间的性能的折衷以及作为大气水蒸气的结果的降水反应。某些类型的雷达主要设计用于采用多普勒转移来计算风速以及双极化以识别降雨的类型。
映射雷达
这些雷达主要用于检查遥感和地理应用的大型地理区域。作为合成孔径雷达的结果,这些限于相当静止的目标。在与建筑材料中发现的墙壁相比,有一些特定的雷达系统用于检测墙壁后的人类更加不同。
导航雷达
一般来说,这些和搜索雷达是一样的,但是它们的波长很小,能够从地面和石头上复制。它们通常用于商业船只和长途飞机。有不同的导航雷达,如海上雷达,通常放置在船舶上,以避免碰撞和导航目的。
脉冲雷达
脉冲雷达向目标对象发送高功率和高频脉冲。然后它在发送另一个脉冲之前等待来自对象的回声信号。雷达的范围和分辨率取决于脉冲重复频率。它使用多普勒换档方法。
多普勒频移雷达探测运动目标的原理是:静止目标的回波信号是同相的而运动目标的回波信号会有一定的相位变化。这些雷达分为两类。
脉冲多普勒
它发射高脉冲重复频率以避免多普勒模糊。发射信号和接收的回波信号在一个检测器中混合以得到多普勒偏移,并使用多普勒滤波器对差信号进行滤波,在那里不需要的噪声信号被拒绝。

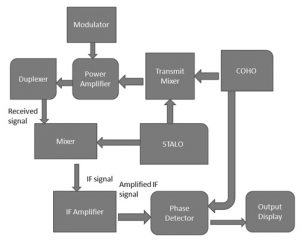
移动目标指示器
它发送低脉冲重复频率,以避免距离模糊。在MTI雷达系统中,接收到的目标回波信号被定向到混频器,在那里它们与来自稳定的本振(STALO)的信号混合,产生中频信号。
这个中频信号被放大,然后给相检波器,它的相位与来自相干振荡器(COHO)的信号的相位相比较,并产生差信号。相干信号与发射机信号具有相同的相位。将相干信号和STALO信号混合后,通过脉冲调制器接通和断开功率放大器。
连续波
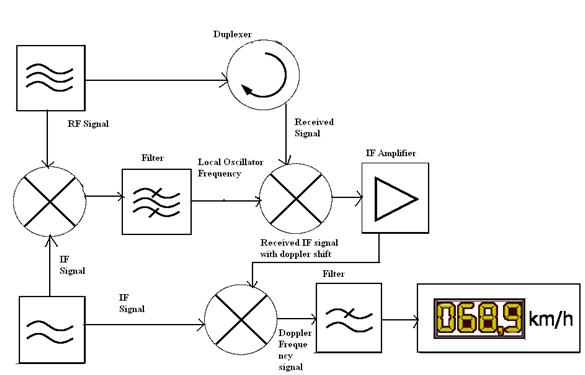
连续波雷达不测量目标的距离,而是通过测量回波信号的多普勒频移来测量距离的变化率。在连续波雷达中发射的是电磁辐射而不是脉冲。它主要用于速度测量。
射频信号和中频信号在混频器阶段混合以产生本振频率。然后发射射频信号,雷达天线接收的信号由射频频率加上多普勒移频组成。在第二混合阶段将接收到的信号与本振频率混合以产生中频信号。
该信号被放大并给出到第三混合阶段,其中它与IF信号混合以使信号具有多普勒频率。该多普勒频率或多普勒频率给出了目标范围的变化率,从而测量目标的速度。
雷达范围方程式
雷达距离方程有不同的版本。在这里,下面的方程是一个基本类型的天线系统。假设目标位于天线信号的中间,则雷达最高探测距离为
Rmax = 4√Pt λ2G2σ/(4π)3Pmin
= 4√Pt C2G2σ/ fo2 pmin(4π)3
' Pt ' =发射功率
'PMIN'=最小可检测信号
' λ ' =发射波长
σ =目标雷达的横截面
' fo ' =频率(Hz)
'g'=天线的增益
' C ' =光速
在上述方程中,变量是稳定的,并且依赖于RCS等目标之外的雷达。发射功率的阶数为1 mW (0 dBm),对于20 dBm (100 mW)的ERP(有效辐射功率),天线增益约为100 (20 dB)。最不明显的信号的顺序是皮瓦,一辆车的RCS可能是100平方米。
因此,雷达范围方程的精确性将是输入数据。PMIN(最小明显信号)主要取决于接收器(B),F(噪声系数),T(温度)和必要的S / N比(信噪比)的带宽。
与宽BW接收器相比,具有窄带宽的接收器将更加响应。噪声系数可以定义为;它计算接收器可以朝向信号贡献多少噪声。当噪声系数较小时,噪声将少捐赠。当温度升高时,它将通过上升输入噪声来影响接收器的灵敏度。
Pmin = k T B F (S/N)min
从上面的等式,
' Pmin '是最小的可检测信号
“k”是波尔兹曼常数,比如1.38 x 10-23(瓦特*秒/°开尔文)
T是温度(开尔文)
'B'是接收器(Hz)的带宽
'f'是噪声系数(db),噪声系数(比率)
(s / n)min =最小s / n比
可用的i/p热噪声功率可与kTB成正比,无论k为玻尔兹曼常数,T为温度,B为以赫兹为单位的接收机噪声带宽。
T = 62.33°F或290°K
B = 1 Hz
kTB = -174 dBm/Hz
上述雷达距离方程可以写成接收功率,如给定发射功率、天线增益、RCS和波长的函数范围。
Pt λ2G2σ/(4π)3R4max = Pt λ2G2σ/(4π) 3R4fo2
prec = ptg2(λ/4π)2σ/4πr2
从上面的等式,
“Prec”是接收到的功率
Pt是发射功率
'fo'是发射频率
λ是发射波长
“G”是天线的增益
'σ'是雷达的横截面
'r'是范围
“c”是光速
应用程序
的雷达的应用包括以下。
军事应用
它在军事上有3个主要应用:
- 在防空中,它用于目标检测、目标识别和武器控制(将武器导向被跟踪的目标)。
- 在导弹系统中指导武器。
- 在地图上识别敌人的位置。
空中管制
它在空中交通管制中有3个主要应用:
- 控制机场附近的空中交通。空中监视雷达用于探测和显示飞机在机场航站楼的位置。
- 使用精密接近雷达引导飞机降落恶劣天气。
- 扫描机场表面以寻找飞机和地面车辆的位置
遥感
它可用于观测行星位置或监测海冰,以确保船舶的平稳路线。
地面交通管制
交通警察也可以用它来确定车辆的速度,通过警告其他车辆的存在或他们身后的任何其他障碍来控制车辆的移动。
空间
它有3个主要应用
- 引导太空飞行器在月球上安全着陆
- 观察行星系统
- 探测和跟踪卫星
- 监测流星
所以,现在我给了一个基本的雷达的理解,设计一个涉及雷达的简单项目怎么样?
照片学分
- 连续波雷达的方框图Radartutorial
分享这篇文章:




最好获得知识
嗨Irfan.
谢谢你!
很好的解释
嗨Gi金
非常感谢。
一流的. .我非常喜欢。感谢你使用简单的词语。我们总是访问您的网站。再次感谢。? ? ?
好的