
使用手机和遥控器的机器人控制技术
机器人介绍
机器人是看起来像人类的机器。已经编程为做一些事情。这个词机器人来自斯拉夫词robota(意思是强迫劳动者)。机器人于1960年代开发。摩托车由其他元素的金属和混合器制成。机器人只是做命令和人类所说的。三十年前的机器人是一个科幻电影中的东西。但今天的机器人在许多地区使用。这对人类的未来非常重要。这机器人技术有关帮助国防,医疗保健,制造,国土安全,教育,消费品和许多不同部门的改善。医生已经在特殊手术中使用机器人。机器人很重要,因为它表现了危险,不可能的任务也是如此。
机器人已经受欢迎的5个原因
- 速度
- 危险环境
- 重复的任务
- 效率
- 准确性
速度:
可以使用机器人,因为它们比执行任务的人更快。机器人真的是由计算机控制的机制。我们知道计算机可以与人类进行计算和处理数据。一些机器人实际上移动更快地执行任务,例如拾取和插入物品,比人类快。
危险环境:
机器人可能是危险的环境,因为它们可以在人类处于危险之中工作。例如,机器人可以设计成具有更大的热量,辐射,化学烟雾比人类所能。
重复任务:
有时候机器人比人类更快,但他们擅长一遍又一遍地做同样的工作。这对机器人来说很容易,因为一旦机器人被编程到一次作业一次,同一程序就可以多次运行许多时间来执行作业。而且机器人不会因为人类而无聊。
效率:
效率是关于在没有浪费的情况下执行任务。这个意思
- 不浪费时间
- 不浪费材料
- 不浪费能量
准确性:
准确性完全是练习任务。在工厂制造项目中,必须与每个项目相同。当组装物品时,机器人可以在毫米的分数内定位部分。
控制机器人
基本机器人或机器人系统由刚体组成,该刚体容纳机器人的整个电路。电路由传感器组成,传感器感知环境中的任何变化并将该信息馈送到控制单元。
基于来自传感器的输入,控制单元相应地控制致动器。因此,机器人的主要操作位于控制单元。在一些应用中,机器人是完全自动的,即控制装置本身内部并基于一些传感器单元,致动器由控制单元自动控制。在某些应用中,机器人手动控制。
让我们看到两种方法可以手动控制机器人
- 使用手机
- 使用电视遥控器
手机控制机器人车辆:
当我们谈论时无线机器人车辆,我们通常考虑RF技术电路。但这个项目非常不同。它使用手机来控制机器人车辆的运动。在这里,我们使用DTMF技术通过使用手机来控制机器人车辆。我们使用了两个手机,一个连接到机器人,另一个是用户手机。bob的是什么网站在这两个移动设备之间建立通信,如果按下任何键,则会听到该音调对单元格的另一端。这种音调被称为“双音多频”音调(DTMF)。


该项目旨在开发一个机器人车辆由手机控制。这是基于8051微控制器。两种手机根据要求控制机器人。一个手机连接到机器人,另一个手机是用户小区。当按下用户手机上的键时,键生成相应的音调,它会在另一个小区处接收。通过DTMF解码器的帮助,通过微控制器处理收到的音调。解码器将DTMF音调解码为二进制数字,并且这些二进制编码数据被发送到微控制器。基于来自手机的输入,微控制器相应地给出了电动机驱动器的适当信号以在所需方向上旋转每个电动机。例如,在按下用户移动上的特定数字时,呼叫将自动拨打到系统手机。系统移动连接到DTMF解码器,相应地解码音调,电动机沿按压对应的方向旋转。
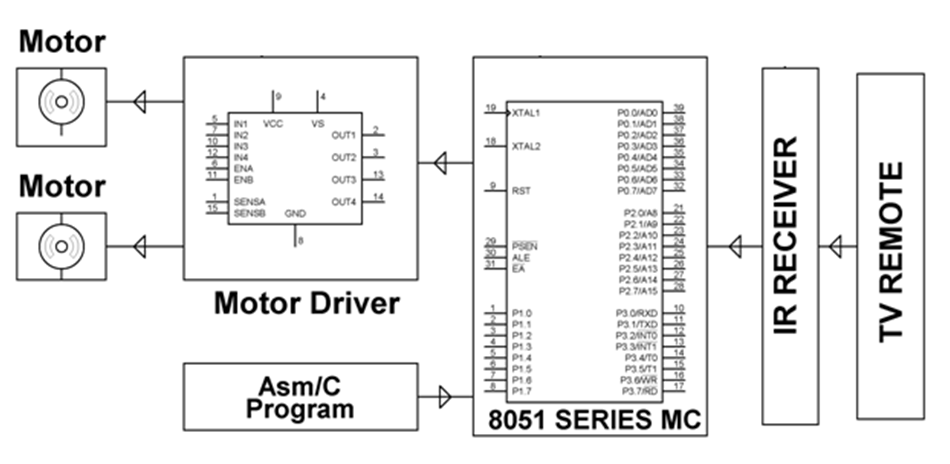
IR控制机器人车辆:
在该系统中,主要是机器人车辆由电视遥控器控制。红外线(IR)传感器接合到机器人控制单元,用于感测远程信号。将该信息传递给控制单元,控制单元按照要求移动机器人。微控制器用作控制系统。
在这个红外遥控器随着发射器。在遥控器中按下按钮的点,信号将通过IR接收器通过并获得。此标志被发送到微控制器,根据遥控器按下按钮,对信号进行解码并执行相关的移动。例如,如果在远程中按下数字1,则根据我们的要求将左转。另一个事业测试(向前,向后和右)将以利用IR的比较方式进行。在接收端,通过连接到微控制器的两个电动机实现了开发。
该程序是写入的,而在执行它的情况下,根据其要求将该命令发送到电动机驱动器IC,其要求如上所述的机器人移动。
如果有关本文的任何疑问,请发表评论。让我知道更多的应用程序和方法?
分享这个帖子:




爵士我是一个障碍,我想了解更多关于这个项目的详细信息。