
伺服电机工作原理和8051微控制器的接口
伺服电机是独立的机械装置,用于控制机器的精度很高。从玩具到工业自动化的许多应用中都有这些特性。有各种各样的电机,但伺服电机是专为特定的角度位置来控制机器。通常采用伺服电机控制0°~ 180°和0°~ 90°之间的角运动。的伺服电机工作原理基于PWM (脉冲宽度调制)脉冲。

伺服电机与8051单片机接口
伺服电机是用于精确角度运动的最常用的电机之一。使用伺服电机的优点是可以在没有任何反馈机构的情况下控制电机的角度位置。伺服电机通常用于商业和工业应用。它们也被广泛应用于驱动系统,如机器人,飞机等。
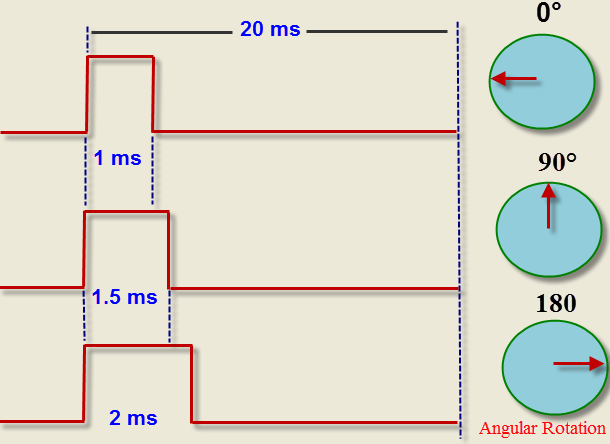
爱好伺服电机的工作原理和操作非常简单,它由三根导线组成,其中两根(黑色和红色)用来提供电源,第三根导线用来提供控制信号。脉冲宽度调制(PWM)波被用作控制信号,其角位置由控制输入处脉冲的宽度确定。在本文中,我们使用的伺服电机具有从0-180°的旋转角度,角度位置可以通过改变占空比在1ms到2ms之间进行控制。
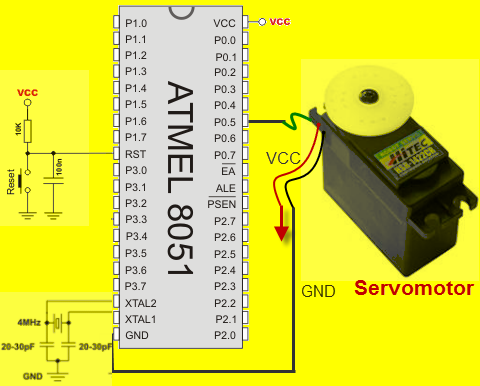
这里伺服电机接口8051微控制器,连接到接地销和电机的黑线从红色线上获得电源。控制8051微控制器的伺服电机连接端口0。11.0592MHz晶体振荡器用于向微控制器和22PF陶瓷电容器提供脉冲的时钟,用于稳定晶体的操作。10kΩ和10UF电容用于为微控制器提供RESET的电源。
控制伺服电机与角度旋转
伺服电机工作原理主要取决于占空比。它使用脉冲宽度调制(PWM)波作为控制信号。通过控制引脚的脉冲宽度旋转角度。这里伺服电机用于从0到180度的旋转角度。我们可以通过改变1ms至2ms之间的脉冲来控制精确的角度位置。
具有角度旋转的伺服电机编程
# include < reg51.h >
SBIT SERMOMOTOR_PIN = P0 ^ 5;
空白延迟(无符号int);
void servo_delay(无符号int);
void main()
{
servomotor_pin = 0x00;
做
{
//转到0°
servomotor_pin = 0x01;
Sevo_delay(50);
servomotor_pin = 0x00;
延迟(1000);
//转90度
servomotor_pin = 0x01;
Sevo_delay(82);
servomotor_pin = 0x00;
延迟(1000);
//转180度
servomotor_pin = 0x01;
Sevo_delay(110);
servomotor_pin = 0x00;
延迟(1000);
而(1);
}
}
空白延迟(无符号int a)
{
unsigned int p;
(p = 0; p <; p + +)
for(p = 0; p <250; p ++);
}
void servo_delay(无符号int a)
{
unsigned int p;
(p = 0; p <; p + +)
for(p = 0; p <250; p ++);
}
伺服电机工作原理
伺服电机工作原理主要取决于“弗莱明的左手规则”。基本上伺服电机适用直流电机,位置传感器,齿轮减小和电子电路。直流电动机可从电池供电,并以高速和低扭矩运行。我们组装轴和齿轮连接到DC电动机,然后我们可以逐渐增加和降低电机速度。
位置传感器从轴的固定位置感知轴的位置,并将信息发送到控制电路。控制电路对来自位置传感器的信号进行相应解码,并将电机的实际位置与首选位置进行比较,从而相应地控制直流电机的旋转方向以获得所需的位置。一般伺服电机需要4.8V到6v直流电源。
伺服电机通过串口命令控制
本课题的主要目的是利用个人计算机对伺服电机进行控制。它需要一条从微控制器和串行输入线,从个人计算机的串口发送命令到电路。定时源由晶体振荡器提供。设计了伺服电机电路,通过串口线和液位移位器与计算机连接,然后在PC机上打开“超级终端”软件来选择计算机的端口。

一旦命令通过带电平移位器的超级终端从个人计算机(PC)到微控制器,微控制器获得该数据并将其与预定义数据进行比较,并生成相应的信号以激活电机驱动器以驱动它所需的速度。许多微控制器项目基于伺服电机开发的平衡机器人、跑道直升机等。我们可以使用伺服电机的安全目的,通过连接无线摄像头,我们可以控制摄像头360度的偏离。
自平衡机器人
自平衡机器人能够在伺服电机的帮助下平衡自身。该机器人使用结构,机械和电子元件组装,其产生明显不平衡平台,该平台高度设置为在一个对准中倾斜。机器人的轮子能够以两种方式独立旋转,由伺服电动机驱动。有关设备相对于地面的角度的信息将获得倾斜传感器在设备上。
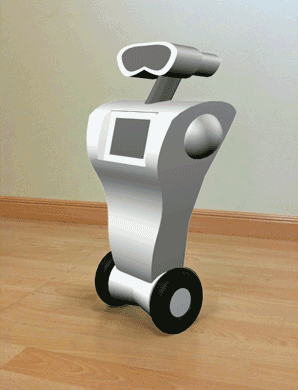
倾斜传感器可以是加速度计,陀螺仪传感器或IR传感器(距离地面的距离)。传感器将信息发送到控制单元,该控制单元将使用基本比例,积分的衍生(PID)算法来处理反馈,以将补偿位置控制信号生成到伺服电动机以便平衡设备。
伺服电机的应用
- 它用于压制机器,用于将碎片切割成尺寸
- 用于糖厂加气站
- 它用于标记应用程序
- 采用随机定时功能的包装系统
- 用在飞机上
伺服电机的优点
- 如果电机恢复负载,则驾驶员将增加电机线圈的电流,因为其努力旋转电机。主要是,没有一步的条件。
- 伺服电机可以实现高速操作。
这是关于伺服电机工作原理和与8051单片机接口.furthore,有关本文的任何技术帮助或bob体育棋牌采用RTC、OLED、闪存、定制LCD、触摸屏显示等接口设备设计。你可以在下面的评论区发表你的评论。
分享这个帖子:




我甚至不知道该说什么,这让事情变得如此轻松!
该制品中的切割电动机绝对不是伺服电机,即鼠笼式交流电机。请为您雇用更好的技术审稿人文。