
触觉传感器的工作原理及其类型
WSG-DSA是一个抓手指,它在抓握期间集成了用于高分辨率简档反馈的触觉感测。为了传感目的,它使用DSA9205I智能触觉传感器。它适合WSG的基础钳口顶部,并通过基部钳口内的集成传感器端口与夹具控制器直接接地,以便不需要外部部件和电缆来包括触觉设备到您的处理应用程序。这些类型的手指传感器自动检测和由WSG进行参数化。通过使用强大的脚本界面,可以从夹持器控制器的内部使用压力分布。本文讨论了触觉的类型传感器及其工作。
触觉传感器是什么?
触觉传感器是一种装置。它根据物理与环境的相互作用来测量即将到来的信息。人类的触觉一般是建模的,即皮肤感觉和动觉。皮肤的触摸具有检测由机械刺激、疼痛和温度引起的刺激的能力。动觉触觉接收来自肌肉、肌腱和关节内的感受器的传感器输入。

触觉传感器的类型
有不同类型的触觉传感器,如下所述
- 力/扭矩传感器
- 动态传感器
- 热传感器
力/力矩传感器
力/扭矩传感器与触觉阵列组合使用,以提供动力控制的信息。这些传感器的类型可以感知任何地方的负载,如机械手的远端链接和约束作为皮肤传感器。皮肤传感器通常在更高的带宽提供更准确的力测量。如果机械手连杆是一般定义的,并且假设信号点接触,那么力/力矩传感器就可以给出力和力矩的接触位置信息——这称为内在触觉感知。扭矩传感器的图像如下所示。

动态传感器
动态传感器更小加速度计在手指条或机器人手指的皮肤上。普通函数如人类的帕尔内尼亚语法,并具有同样大的各个领域;因此,一个或两个皮肤加速度计足以用于整个手指。这些传感器有效地检测了接触的制造和破碎,振动与纹理表面的滑动连接。
应力速率传感器是第二类动态触觉传感器。如果指尖以几厘米/秒的速度滑动表面上的小疙瘩或凹坑,皮肤的临时变化就变得很重要。一个压电像PVDF这样的聚合物在受到损伤时产生电荷,然后产生电流,这与变化的范围成正比。
热传感器
热传感器对人类识别所制造物体材料的人类能力很重要,但其中一些也用于机器人。热敏传感涉及检测皮肤中的热梯度,这对应于物体的温度和导热率。机器人热传感器与珀耳帖交叉点相结合涉及热敏电阻的。

触觉传感器的工作原理和电路图
触觉传感器是开发的,为远程操作机械手和智能机器人提供触觉传感能力。触觉传感器可以识别施加到触觉像素的法向力,以使力控制和触觉图像释放并产生对象识别。然而,为了获得触觉图像和正常力,切向的信息对于力控制和防止滑动是至关重要的,这与任务成功令人迷住 - 因此需要三维触觉传感器。
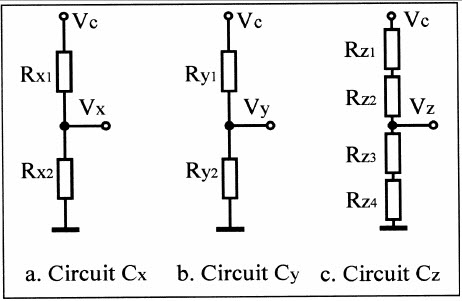
采用压阻式、电容式和可选传感元件研制了几种三维触觉传感器微机电系统技术。集成的传感元件和预处理电路体积小,但对于大多数应用来说,它们太弱,容易破碎;例如,触觉传感器的力范围只有0.01 N w4x,其他触觉传感器不是由MEMS技术提供的。下面的电路图显示了触觉传感器电路。
机器人中的触觉传感器
下面给出了用于NASA机器人的触觉传感器
- 其中一个例子与行星探索直接相关。
- 美国宇航局在国际空间站使用这些传感器来帮助人类修复/维护环境
- NASA已经在机器人中尝试了许多触觉传感器,这些传感器还处于初始阶段。他们利用力传感电阻,现在量子隧道复合材料正在使用中
- 为了开发工业机器人生产的触觉传感器,采用了多个加载按钮和单元
触觉传感器应用
触觉传感器应用被用在
触觉传感器的优点
触觉传感器的优点如下:
- 他们提供易于使用的触觉传感器解决方案
- 触觉传感器没有外部部件和电缆
- 紧凑的提取
- 经过验证的机器人触觉感应技术。
这是关于触觉传感器的工作原理和应用。我们希望所提供的信息有助于提供一些良好的信息和对项目的理解。此外,如果您对这个概念有任何疑问电气及电子工程,您可以在以下部分中发表评论。这是一个问题 - 触觉传感器的功能是什么?
照片信用:
- 触觉传感器广场空间
- 力/力矩传感器Transducertechniques.
- 动态传感器游标
- 热传感器images-amazon
分享这个帖子:




哪一个传感器是用来检测布料的?例如:我想检测一下这块布是否是棉、丝、毛、人造丝和亚麻的。有像“燃烧测试”这样的方法来识别服装面料,我不想使用。难道没有任何传感器或其他计算机视觉算法来识别织物吗?
嗨罗希特
不,但有一些机器人可以根据视觉和触觉与传感器一起检测。
我需要带有触觉传感器的夹具
嗨Ezhilarasi
抱歉通知您,我们不能为您提供这样