
感应电动机的可变频率驱动
介绍
单相管电动机广泛用于电器和工业控制。永磁电容(PSC)单相电容器是这种类型最简单,最广泛使用的电机。
通过设计,PSC电机是单向的,这意味着它们被设计成在一个方向上旋转。通过添加额外的绕组和外部继电器和开关,或者通过使用齿轮机构,可以改变旋转方向。在这个想法中,我们将详细讨论,如何使用PIC16F72微控制器和电力电子控制在两个方向上控制PSC电机的速度。bob足球体育app
选择了PIC16F72微控制器,因为它是最简单,低成本的通用微控制器之一Microchip在其产品组合中。即使它在硬件中没有PWMS以驱动互补的PWM输出插入带有死区,也可以使用定时器和输出到通用输出引脚在固件中生成所有PWM。
什么是可变频率驱动器?
可变频率驱动器或VFD是通过施加AC电源电压的不同频率来控制感应电动机速度的方式。通过控制输出交流频率,可以根据要求以不同的速度驱动电动机。这些是可调节的速度驱动,主要用于工业应用,如泵,通风系统,电梯,机床驱动等,它基本上是节能系统。因此,第一个要求是生成具有不同频率的SINE波,用于VFD。
VFD采用的技术是什么?
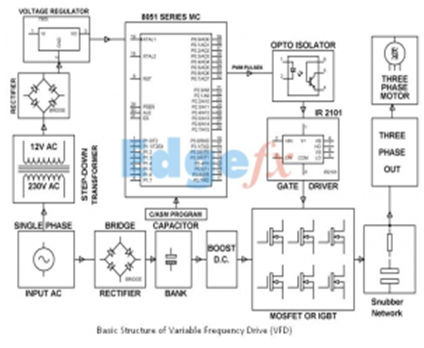
它是系统提供具有不同频率的交流输出来根据需要控制电机的速度。由于大多数设备在单相AC电源中工作,单相变频逆变器更常见。它由全波桥式整流器组成,可将230/110伏AC转换为大约300/150伏DC。来自桥式整流器的输出DC由高值平滑电容平滑,以消除AC的涟漪。然后将该固定电压DC馈送到由MOSFET(金属氧化物场效应晶体管)/ IGBT(隔离栅极双极晶体管)晶体管形成的频率发生电路。该MOSFET / IGBT电路接收DC并将其转换为具有可变频率的AC,以控制器件的速度。
可以使用电子电路或微控制器实现频率变化。该电路改变施加到MOSFET / IGBT电路的栅极驱动的电压(PWM)的频率。因此,不同频率的AC电压出现在输出处。可以编程微控制器以根据需要更改输出的频率。
VFD系统:
可变频率装置具有三个零件,如AC电机,控制器和操作界面。
即使单相,VFD中使用的AC电机通常是三相感应电动机马达用于某些系统。通常使用设计用于固定速度操作的电机,但有些电机设计在VFD中提供比标准设计更好的性能。
控制器部分是固体电子功率转换器电路,用于将AC转换为DC,然后转换为准正弦波AC。第一部分是具有全波整流桥的AC到DC转换器部分,通常是三相/单相全波桥。然后使用逆变器开关电路将该DC中间转换为准正弦波AC。这里MOSFET / IGBT晶体管用于将DC反转到AC。
逆变器部分将DC转换为AC的三个通道以驱动三相电机。控制器部分还可以设计为提供改善的功率因数,较小的谐波失真和对输入交流瞬变的敏感度。
伏特/赫兹控制:
控制器电路通过每赫兹控制方法的伏特调节所提供的交流电机的频率。当频率改变以提供指定的扭矩时,交流电机需要变量施加的电压。例如,如果电机设计为在50Hz的440伏特中工作,则频率变为半(25Hz)时,施加到电机的AC必须减少到一半(220伏)。该监管基于伏特/赫兹。在上述情况下,该比率为440/50 = 8.8V / Hz。
 其他电压控制方法:
其他电压控制方法:

除了伏特/赫兹控制外,更先进的方法,如直接扭矩控制或DTC,空间矢量脉冲宽度调制(SVPWM)等等也用于控制电动机的速度。通过控制电动机中的电压,可以精确地控制磁通量和扭矩。在PWM方法中,逆变器开关通过具有伪正弦变化脉冲持续时间的一系列窄脉冲产生准正弦波。
操作界面:
本节允许用户启动/停止电机并调整速度。其他设施包括电机反转,手动和自动控制之间的切换等。操作界面包括带显示器或指示器和仪表的面板,用于显示电动机的速度,施加电压等。通常提供一组键盘开关。一组键盘开关通常提供了一组键盘开关用于控制系统。
inbuilt -soft开始:
在普通的感应电动机中,使用AC开关接通,电流绘制远高于额定值,并且可以随着负载的加速度增加而增加,以获得电动机的全速度。
另一方面,在VFD受控电机中,施加低频处的最初低电压。这种频率和电压以受控速率增加以加速负载。这比电机的额定值产生几乎更大的扭矩。
VFD电机换向:
首先将频率和施加的电压减小到受控电平,然后保持减小,直到它变为零并且电机关闭。
应用电路控制单相电动机的速度
就电源电路和控制电路而言,该方法相对容易。在输入侧,使用电压倍增器,并在输出侧上使用H形桥或2相逆变器,如图2所示。主桥和启动绕组的一端连接到每个半桥和其他端部连接到交流电源的中性点。
控制电路需要四个PWM,其两个互补对具有足够的互补输出之间的死区。PWM死区是PWM0-PWM1和PWM2-PWM3。PIC16F72没有在硬件中设计PWM以输出我们需要的方式。关于VF,通过改变频率和幅度来合成DC总线。这将使两个正弦电压超出相位。
如果施加到主绕组的电压将开始绕组延迟90度,则电动机在一个(即,前进)方向上运行。如果我们想改变旋转的方向,那么施加到主绕组的电压是进行开始绕组。
我希望您已经了解来自上述制品的感应电动机的可变频率驱动。因此,如果您对此概念或电气有任何疑问电子项目请留下以下意见部分。

分享这个帖子:




如何获得PIC的完整项目VFD?
真的很好的帖子......我是博客的初学者,所以它真的帮助我了。谢谢分享这样一个有用的策略??