
什么是感应电动机的滑差:重要性及其公式
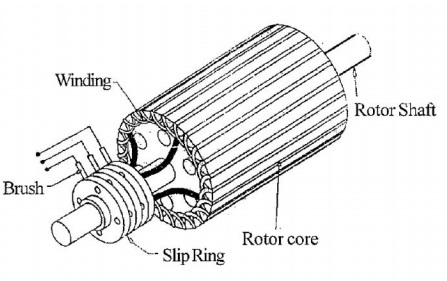
在一个3 -Φ感应电动机时,电机定子会在3- Φ电源输入范围内因相移120度而产生旋转磁场或RMF。因此RMF以其自身速度的定子旋转,即同步速度,用' n '表示。旋转磁场(RMF)与转子相反;因为磁通量的变化会引起电动势。因此,电机中的转子开始以一个被称为实际转速(N)的速度旋转。同步转速和实际转速之间的主要差异被称为SLIP。转差值等于“1”,因为电机中的转子是静止的&它将不等于“0”。因此,当电机运行时,同步速度并不等于给定时间内的实际速度N。本文对异步电动机的转差率进行了概述。
什么是感应电动机的转差率?
定义:在感应电动机中,转差率是转子和旋转磁通量之间的速度,表示为每个单元的同步速度。它可以无量纲测量&该电机的值不能为零。

旋转磁通的同步转速和转子转速分别为Ns和Nr in马达,则它们之间的速度可等于(Ns - Nr)。因此,滑移可以确定为
S = (n - Nr) / n
此时转子转速与同步转速不相等(Nr < Ns),转差值恒定< 1。对于这个电机,它是(0 在这种电动机中,如果把电源交给三相定子绕组是三相的,然后一个旋转磁场可以在气隙内产生,所以这被称为同步速度。这个速度可以用no。以及频率的电力供应.这里极点和频率用P和S表示。 同步转速(N) = 2 f / prp(这里,rps是每秒钟的转数)。 这个磁场旋转将切断不活跃的转子导体因为转子的电路会短路,而产生的电动势会使转子的电流增加。 转子电流与旋转磁通量之间的接口可以产生转矩。因此,根据楞次定律,转子开始向旋转磁场的方向转动。因此,相对转速等于(Ns - Nr),并在两者之间设置,导致电机内部打滑。 转差率在感应电机中的重要性可以在下面根据转差率的值来讨论,因为电机的行为主要取决于转差率的值。 如果转差值为“0”,则转子的转速相当于旋转的磁通量。所以转子的线圈之间没有运动,也没有旋转的磁通量。因此,转子线圈中不存在磁通切断作用。因此,电动势不会在转子线圈内产生产生转子电流。所以这个马达不能工作。因此,在这个电机中必须有一个正的转差值,由于这个原因,转差值在感应电机中永远不会变成“0”。 如果转差值为“1”,那么电机中的转子将是静止的 如果转差值为' -1 ',则电机中转子的转速更接近同步旋转的磁通量。因此,这是可能的,只有当电机内的转子在旋转磁通方向转动使用原动机 这是唯一可能的,当转子是旋转磁通量的方向由一些原动机。在这种情况下,电动机作为一个感应发电机运行。 如果电机的转差值大于1,则转子将向与磁通量公转方向相反的方向转动。所以如果磁通量顺时针方向旋转,那么转子就会逆时针方向旋转。它们的速度是(Ns + Nr)在此电机的制动或堵塞,滑移大于' 1 '是达到迅速使电机转子静止。 的感应电动机转差率的计算公式下面给出。 = (Ns-Nr / Ns) * 100 上式中,“Ns”为转速单位的同步转速,“Nr”为转速单位的转速(每秒钟转数) 如果电机的同步速度是1250,而实际速度是1300,那么请找到电机中的转差率? 1250转/分 每分钟1300转 速度差可以计算为n - n = 1300-1250 = 50 求电动机转差的公式是(n - n)*100/ n = 50*100/1300 = 3.84% 在设计感应电动机时,测量转差率是必不可少的。为此,我们利用上面的公式来了解如何得到差值和滑移率。 在感应电动机中,转矩与转差之间的关系提供了一条曲线,该曲线反映了使用转差所产生的转矩差。转差率的偏差是由转差率与转差率的差值决定的扭矩等效的速度也会不同。 将曲线定义为电动、制动三种模式,并将转矩转差的特性分为低转差、高转差和中等转差三个区域。 在这种模式下,一旦给定子电源,然后电机开始转动在同步。当转差率从' 0 '变为' 1 '时,该电机的转矩会发生变化。空载时为零,有载时为1。 从上面的曲线可以看出,转矩与转差率成正比。当转差越大,则产生的转矩越大。 在这种模式下,电机运行速度高于同步速度。定子绕组连接到3-Φ电源,它提供电能。事实上,这个电机得到机械能,因为扭矩和滑移都是负的,并提供电能。异步电机是利用无功功率工作的,所以它不被用作无功功率发电机.因为无功功率必须从外部提供,并且它工作在同步速度下,那么它使用电能而不是在输出端提供。所以,一般来说,归纳发电机是可以避免的。 在这种模式下,供电电压为极性是改变。因此,感应电机开始以相反的方向旋转,所以电机停止旋转。这种方法适用于任何需要在较短时间内停止电机的场合。 当电机开始旋转时,负载在一个相似的方向内加速,因此电机的速度可以提高到同步速度以上。在这种模式下,它就像一个感应发电机提供电能与市电同步,从而降低了电机的转速。结果,电机停止工作。这种断路原理称为动态断路,否则称为再生断路。 因此,这一切都是关于感应电动机的转差率概述.当电机内转子的转速等于同步转速时,转差为“0”。如果转子在旋转磁场方向上以同步转速转动,则没有磁链的切割作用,转子导体内部没有电动势,转子棒导体内部没有电流流动。因此,电磁转矩无法开发。因此,该电机的转子无法实现同步转速。因此,滑移在电机内部完全不是零。我有一个问题要问你
转差率在感应电动机中的重要性
当Slip的值为' 0 '时
当Slip的值为' 1 '时
当Slip的值为' -1 '时
当Slip值为>时1
公式
例如
感应电动机转矩与滑入的关系
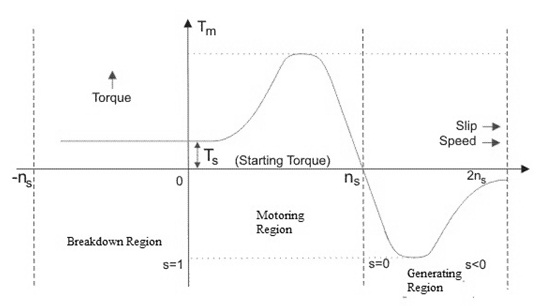
驾驶模式
生成模式
制动模式
分享这篇文章:



